Encouragé par Y. Egels, je ne résiste pas au plaisir de vous monter le résultat de mes derniers bidouillages qui, je n’en doute pas, sont appelés à remporter très bientôt un immense succès.
1- Il s’agît de détourner une XBox Kinect de son usage normal, pour la transformer en scanner 3d. Ceux qui ont des enfants savent déjà de quoi il retourne : un add-on de la XBox 360 de chez MicroSoft.
Ca se compose d’un émetteur/récepteur Infra-rouge (pour mesurer des distances) et d’une caméra (pour enregistrer des couleurs)

2- Ca fait longtemps déjà que l’idée me trotte dans la tête, et en dépit de moult essais, je n’étais jamais parvenu à rien de bon, jusqu’à hier soir, Euréka !

Outre la fameuse Kinect, il faut procéder à diverses installations logicielles et drivers, pour lesquelles on trouvera les softs aux adresses suivantes :
– les drivers : http://zigfu.com/ (option tout-en-un, bien plus facile à installer)
– sinon, voir là : http://openkinect.org/wiki/Getting_Started
– et/ou là : http://www.codeproject.com/Articles/148251/How-to-Successfully-Install-Kinect-on-Windows-Open
– les logiciels de capture (RGBDemo, mais il y en a d’autres potentiels) : http://labs.manctl.com/rgbdemo/index.php/Main/HomePage
3- RGBDemo propose plusieurs applicatifs pour différents types de captures qui s’exportent au format PLY, ouvrables dans MeshLab. Parmi les applications de RGBDemo, et après avoir imprimé un canevas-type fourni, une option de calibration permet de produire des nuages de points à l’échelle métrique.
Voici mon bureau vu dans MeshLab : près de 900 000 points saisis en quelques secondes…
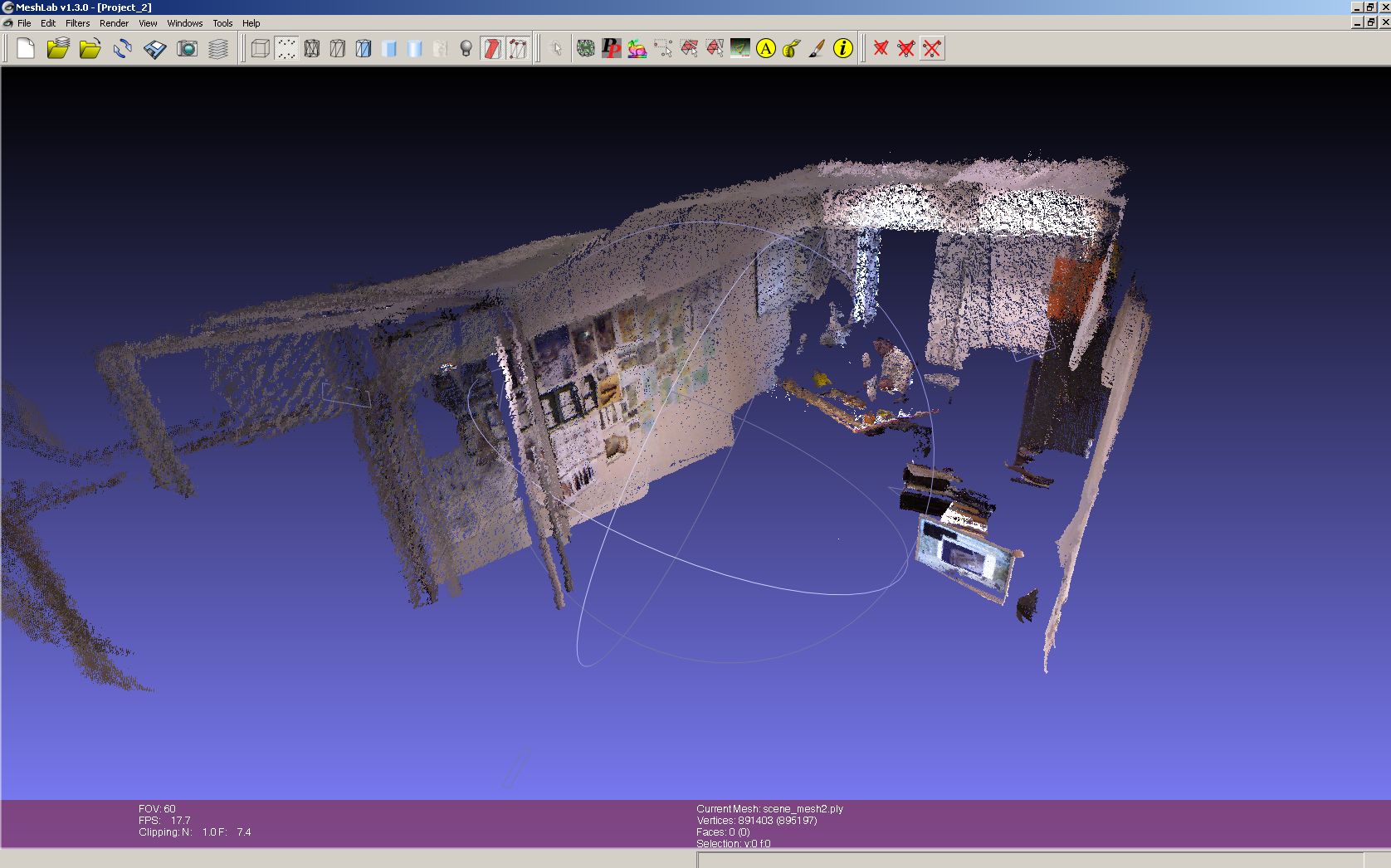
Mes rapides premiers essais produisent environ 1 point tous les 5 mm. Je considère que c’est pas mal pour ce prix…
Faro propose d’ores-et-déjà une appli baptisée Scenect (voir la vidéo sur YouTube), qui ne fonctionne qu’avec un PC 64 bits, et que je n’ai donc pas pu tester avec ma machine.
Voir là : http://www.faro.com/scenect/
Vous imaginez facilement les applications possibles de la chose, avec un rapport qualité-prix qui sera difficile à battre.
En particulier, je vois déjà ma Kinect embarquée sur un drone…
Bonjour,
je viens de lire votre contribution relative à l’acquisition 3D à partir d’une Kinect.
Bravo pour ce bel exemple d’exploitation d’un matériel grand public à des fins bien différentes de son objet d’origine.
J’ai également bien noté votre rêve …. qui rejoins le mien : trouver le moyen d’embarquer un scan 3D sur un drone.
N’hésitez pas à me contacter pour échanger sur le sujet.
Stéphane
Bonjour,
C’est a peut pres, ce que je réve de réaliser…
Spéléologue, mon projet serait de reconstituer une grotte en 3d, sorte de visite virtuel de la cavité. J’avais pensée a la kinet pour scanner la grotte…
Pensez vous que ce projet est réalisable…
Cordialement
Pascal
Bonjour,
Je suis en train de travailler sur une version portable de cet appareil. J’ai réussis à remplacer la prise secteur de la kinect avec une batterie. Donc mon systeme est transportable. Le problème est que je n’arrive pas à faire fonctionner les drivers. —‘ mais cela est tout à fait réalisable. Contactez moi pour plus de renseignements.
Bonjour,
Dans les deux cas (embarquement sur un drone, promenade dans une grotte), le problème qui se posera est celui de l’alimentation électrique.
Si on peut, à la rigueur, tendre une rallonge dans la grotte, ça me semble compromis pour embarquer un groupe électrogène sur le drone.
Fred P.
Bonsoir,
Merci pour ce petit article concernant le scan 3d, c’est le parcours du combattant pour trouver une solution peu onéreuse. J’attends ma kinect pour essayer.
Petite question, l’alimentation est elle indispensable pour scanner ?
Dany.
Bonjour,
Oui, l’alimentation est indispensable, car la Kinect ne se nourrira pas au port USB du PC.
Vos retours d’expérience personnels seront appréciés.
Bonjour,
Petit renseignement ce processus est il précis?c’est a dire scanner un objet et récupérer les mesures à Echelle?
Cordialement les bistouques
Bonjour,
D’après les essais que j’ai pu faire, ce n’est pas très satisfaisant pour des petits objets, car la distance minimum de prises de mesure ne doit pas être inférieure à environ 70 cm (et une distance maximum de 7 mètres, limitations propres à la Kinect).
En revanche, c’est très intéressant pour du relevé de bâti assez grossier, avec environ un point tout les 5 mm.
Le nuages de points produits avec la méthode décrite ci-dessus sont à l’échelle métrique.
Vos retours d’expérience seront appréciés egalement,
Fred P.
Salut à tous,
Pour ce qui est de la précision il y a sur youtube une vidéo d’un scan de basket (montage sur un tourne disque) qui a l’air d’être assez précis ci joint le lien http ://www.youtube.com/watch?v=V7LthXRoESw
pour ma part je n’ai pas encore fait d’essai. Sinon je suis en train de travailler sur skanect lien http://skanect.manctl.com/download-previous-version/
Bonne continuation, Dany.
Bonjour, après avoir lu tout ceci, voila bien des domaines qui seront concernés!!!.
Pour cela, est il possible de régler a convenance la précision du scan?
Je doute qu’il soit intéressant d’embarquer une Kinect à bord d’un drone. Car la kinect utilise une projection de motif en proche infrarouge. Je pense que cette projection doit difficilement être visible sous la lumière du soleil. Mais si l’expérience est tenté, je suis curieux de voir le résultat.